Bộ thí nghiệm Robot thông minh & ứng dụng hệ thống tự động hóa
Email: minh.lt@mnm.vn



- Address: 440/65E, Nguyen Kiem, Ward 03, Phu Nhuan District, Ho Chi Minh City
- 0988535616
- minh.lt@mnm.vn
- https://www.mnm.vn


Bộ thí nghiệm Robot thông minh & ứng dụng hệ thống tự động hóa
(0 nhận xét)
-
MM-ROBOIOT
-
Liên hệ
-
442
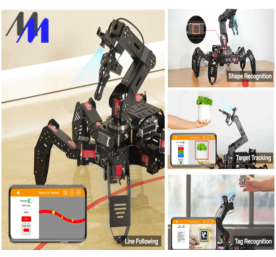
- Bộ thí nghiệm lập trình / điều khiển với hai Robot mã nguồn mở nhỏ gọn dựa trên ROS
- Bộ thí nghiệm được xây dựng xung quanh hai bộ băng tải công nghiệp tích hợp động cơ servo. Điều khiển vị trí vòng kín được đảm bảo bởi động cơ servo hiện đại. PLC Siemens S7-1200 thông qua cấu trúc liên kết truyền thông Profinet
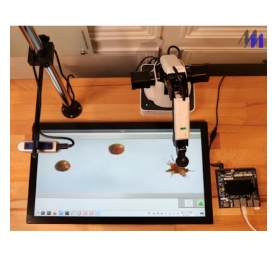
- Hai cánh tay rô-bốt (với 4 DoF và bộ kẹp điện) được sử dụng kết hợp với nhau thành hệ thống thí nghiệm từ cơ bản đến nâng cao.
- Mỗi rô-bốt được điều khiển bởi OpenCR, một nền tảng phần cứng/phần mềm nguồn mở, được sử dụng để điều khiển rô-bốt.
- Bộ thí nghiệm tích hợp màn hình giám sát HMI
- Lập trình robot sử dụng nền tảng phần cứng và phần mềm mở
- Robot mã nguồn mở nhỏ gọn dựa trên ROS
- Modul điều khiển được phát triển cho các hệ thống nhúng ROS để cung cấp phần cứng và phần mềm nguồn mở hoàn toàn.
- Lắp ráp sản phẩm 3D với 2 cánh tay robot
- Nguyên lý và chức năng của các cảm biến và bộ truyền động công nghiệp khác nhau
- Thực hiện chuyển động có điều khiển trên 2 băng chuyền và đồng bộ với 2 cánh tay robot
- Điều khiển hệ thống bằng PLC-S7-1200 & HMI KTP700 của Siemens
- Điều khiển động cơ Servo của băng tải sử dụng Servo Drives SINAMICS V90
- Sử dụng động cơ servo 1FL6 hoạt động với băng chuyền giúp định vị chính xác cao
- Định vị vật mang phôi
Sản phẩm cùng loại